摘要:
步进电机广泛应用于各种自动化设备中,如机器人、数控机床等。然而,由于步进电机本身结构特点的限制,其运动精度常常难以满足一些高精度的应用需求。为了提高步进电机的运动精度,研究人员采用...
摘要:
步进电机广泛应用于各种自动化设备中,如机器人、数控机床等。然而,由于步进电机本身结构特点的限制,其运动精度常常难以满足一些高精度的应用需求。为了提高步进电机的运动精度,研究人员采用... 步进电机广泛应用于各种自动化设备中,如机器人、数控机床等。然而,由于步进电机本身结构特点的限制,其运动精度常常难以满足一些高精度的应用需求。为了提高步进电机的运动精度,研究人员采用了以接线步进电机驱动器的方法,通过优化驱动电路的设计和控制算法,实现步进电机的高精度运动控制。
一、步进电机基本原理及特点分析
在介绍以接线步进电机驱动器的方法之前,首先对步进电机的基本原理及特点进行了分析。步进电机是一种将电脉冲信号转换为角位移的执行器,具有位置控制精度高、响应速度快等特点。
二、传统步进电机驱动器存在的问题及局限性
传统的步进电机驱动器存在一些问题和局限性,如共振现象、振荡现象、低速抖动等。这些问题限制了步进电机的运动精度和稳定性。
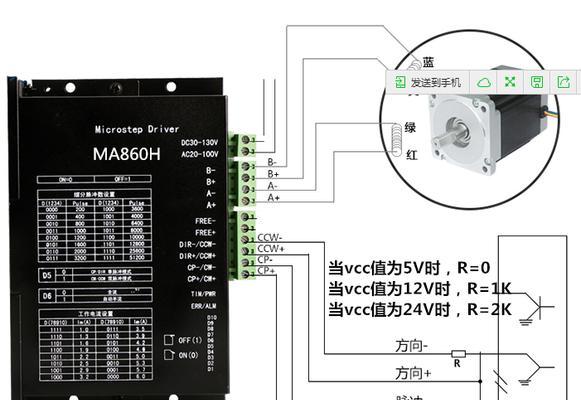
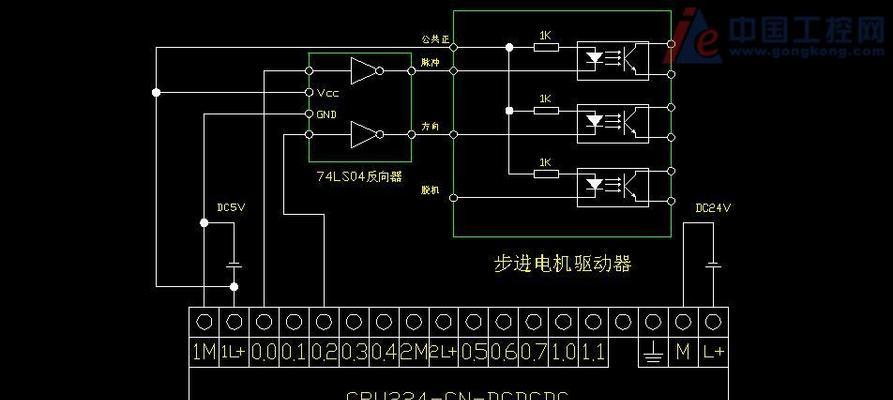
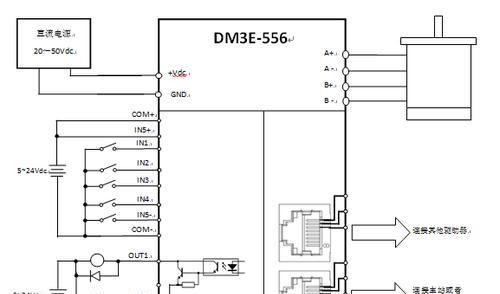
三、接线步进电机驱动器的基本原理
接线步进电机驱动器是通过对步进电机的绕组进行不同的接线方式,改变电机的相序,从而实现电机的高精度运动控制。
四、双相四线驱动方式及其优化
双相四线驱动方式是接线步进电机驱动器中常用的一种方式。本节介绍了双相四线驱动方式的原理,并提出了优化措施,如改善电流分配、减小误差等。
五、八相八线驱动方式及其优势分析
八相八线驱动方式是接线步进电机驱动器中的另一种常见方式。本节对八相八线驱动方式进行了详细的介绍,并分析了其在提高步进电机运动精度方面的优势。
六、微步进驱动技术及其应用
微步进驱动技术是接线步进电机驱动器中的一种重要技术。本节介绍了微步进驱动技术的原理和应用,包括全步进、半步进、四分之一步进等模式。
七、电流控制技术在步进电机驱动中的应用
电流控制技术在接线步进电机驱动器中起着关键作用。本节详细介绍了电流控制技术在步进电机驱动中的应用,包括电流控制方式选择、电流大小的优化等。
八、位置闭环控制算法及其实现
位置闭环控制算法是提高步进电机运动精度的重要手段之一。本节介绍了常用的位置闭环控制算法,如PID算法、模糊控制算法等,并讨论了它们的实现方法。
九、速度闭环控制算法及其实现
速度闭环控制算法也是提高步进电机运动精度的一种重要手段。本节介绍了常用的速度闭环控制算法,如PI算法、逆向传递函数算法等,并详细阐述了它们的实现过程。
十、微步进精度校准方法及策略
微步进精度校准是确保步进电机运动精度的关键一环。本节介绍了微步进精度校准方法及策略,包括相位误差补偿、步距误差补偿等。
十一、接线步进电机驱动器的实际应用案例
本节通过实际应用案例,介绍了接线步进电机驱动器在各个领域的应用情况,如机器人运动控制、医疗设备、自动化生产线等。
十二、接线步进电机驱动器的发展趋势
接线步进电机驱动器作为一种提高步进电机运动精度的关键技术,其发展趋势也备受关注。本节对接线步进电机驱动器的发展趋势进行了分析和展望。
十三、接线步进电机驱动器与其他驱动方式的对比
本节对接线步进电机驱动器与其他驱动方式进行了对比分析,包括直流电机驱动、伺服电机驱动等,以及它们在不同应用场景下的优缺点。
十四、接线步进电机驱动器的挑战和解决方案
接线步进电机驱动器在实际应用中面临一些挑战,如高速运动下的振动问题、热量积聚等。本节探讨了这些挑战,并提出了相应的解决方案。
十五、接线步进电机驱动器对步进电机运动精度的影响
通过对接线步进电机驱动器的研究和分析,本文了接线步进电机驱动器对步进电机运动精度的影响,并展望了未来的研究方向。
接线步进电机驱动器是提高步进电机运动精度的关键技术之一。通过优化驱动电路设计、控制算法选择和精确校准等手段,可以有效提高步进电机的运动精度和稳定性。随着科技的不断进步,接线步进电机驱动器在各个领域的应用也将会更加广泛。